
پژوهشگران ژاپنی سوسک سایبورگ مجهز به انرژی خورشیدی ساختهاند
آیا تا به حال دیدن سوسک سایبورگی را که با انرژی خورشیدی کار کرده و یک کوله پشتی شبیه مدار الکتریکی بر پشتش حمل میکند، در ذهنتان تصور کردهاید؟ چنین تصوری شاید اندکی عجیب بهنظر آید؛ اما اکنون تیمی از محققان در مؤسسه تحقیقاتی RIKEN ژاپن با اتصال یک باتری لیتیومی، یک سلول خورشیدی، چند سیم و درنهایت با اتکا به یک مدار الکترونیکی کوچک، سوسک معمولی ماداگاسکار را به یک حشرهی سایبورگ واقعی تبدیل کردهاند. سایبورگهای ساختهشده را میتوان با استفاده از سیگنالهای بلوتوث کنترل کرد. همچنین محققان پیشنهاد میکنند که در آینده میتوان از این رباتها برای مأموریتهای جستجو و نجات نیز بهره گرفت.
محققان از سایبورگ خود بهعنوان یک سیستم هیبریدی حشره-رایانه یاد میکنند که حشرهی زندهای را بهعنوان یک پلتفرم و یک سیستم مینی الکترونیکی را هم بهعنوان کنترلکننده در خود جای داده است. اساساً، این سیستم را باید یک ربات زیستی در نظر گرفت؛ زیرا در عین اینکه میتوان آن را همانند یک ربات کنترل کرد، این قدرت را نیز دارد که با مهارت یک حشره، بتواند محیطی پیچیده را کاوش و جهتیابی کند. تیم محققان ادعا میکنند که سایبورگهای حشرات میتوانند حتی رباتهای نرم سنتی را در هنگام پیمایش مفید در دنیای واقعی شکست دهند.
اتکا به توان خورشید
محققان با در نظر گرفتن شکل بدن این سوسک ۶ سانتیمتری، یک «کولهپشتی» پلیمری طراحی کردند. این کوله پشتی میتواند تمام تجهیزات الکترونیکی را بدون ایجاد مزاحمت برای حشره هنگام حرکت حمل کند. کوله پشتی دارای یک کنترلر الکترونیکی، یک باتری لیتیومی و چندین سیم بود. هر سیم از یک طرف به کنترلر و از طرف دیگر به پاهای متمایز سوسک متصل بود.
هر زمان که محققان قصد حرکت دادن سوسک را داشته باشند، یک سیگنال بلوتوثی را به برد مدار می فرستند و این مدار در ادامه، جریان الکتریکی را ازطریق سیمها به پاها منتقل میکند. این جریانها درواقع ورودیهای حسی را تقلید میکنند؛ ورودیهایی که با بهره بردن از رفتار انعکاسی، سوسک را به سمت راست یا چپ هدایت میکند. باید توجه کنیم که با تمام این تجهیزات الکترونیکی، مغز سوسک هنوز هم برای فعال کردن ماهیچههای آن و به حرکت در آوردن سوسک نقش کلیدی دارد.

- نگاهی به مشهورترین سایبورگهای واقعی جهان
محققان پس از اندک زمانی متوجه شدند که یک حشره سایبورگ ممکن است برای چندین روز یا حتی هفتههای متوالی در برخی عملیاتها یا مأموریتها مورد نیاز باشد. از سویی آنها میدانستند که باتری کوچک لیتیومی برای چنین مدت زمانهای طولانی برای پاسخگویی به انرژی مورد نیاز کفاف نخواهد داد و ازآنجاکه مغز سوسک دست نخورده باقی مانده است، این امکان وجود خواهد داشت که سیستم هر نوع مأموریت محولشده به خود را رها کرده و بهتعبیری فرار کند!
در مسیر فایق آمدن بر چالش انرژی و برای تقویت منبع انرژی کلی سایبورگ، محققان یک سلول خورشیدی فوق نازک ایجاد کردند. این سلول خورشیدی برای غلبه بر مشکل انرژی در داخل شکم سوسک کار گذاشته شد. با وجود اینکه سلول خورشیدی یادشده تنها ۴ هزارم میلیمتر ضخامت دارد، ولی میتواند توانی معادل ۵۰ برابر توان مورد نیاز واحد کنترل را تأمین کند. ولی یک مشکل اساسی وجود داشت. سلول خورشیدی ساختهشده به حدی پهن بود که مانع حرکت سوسک میشد. محققان در طی آزمایش اولیه، دریافتند که این حشره با نیمی از سرعت اولیهی خود حرکت میکند و بعد از هر بار سقوط یا انحراف از مسیر اصلی، نمیتواند به جهت طبیعی خود بازگردد.
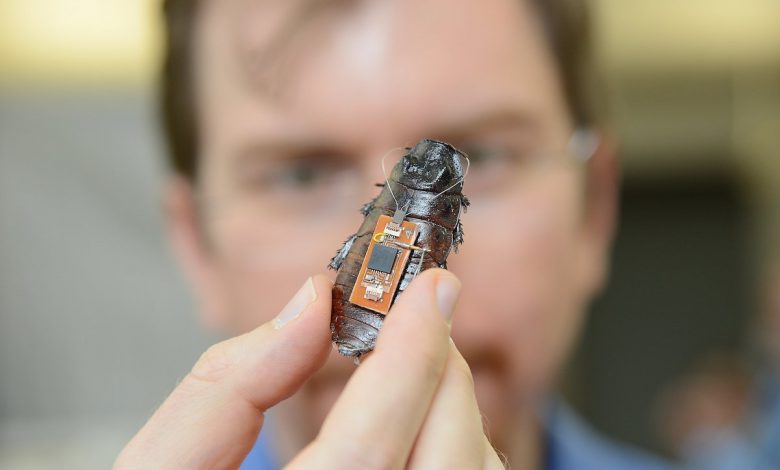
تصویری از سوسک سایبورگ ساختهشده توسط محققان در ژاپن
تیم تحقیق، تنظیماتی را روی موقعیت و آرایش سلول اعمال کردند و در نهایت توانستند سوسک سایبورگ را به سلول خورشیدی و باتری مجهز کنند؛ باتری که در مجموع ۱۷/۲ میلیوات انرژی فراهم میکرد. کنجیرو فوکودا، یکی از نویسندگان این مطالعه با تأکید بر اهمیت واحد سلول خورشیدی میگوید:
برای موفقیت در انجام وظایف مرتبط با عملیاتهای نجات شهری، حشرات سایبورگ رایانههایی را برای کنترل حرکت و همچنین حسگرهایی را برای جستجوی افراد و دستگاههای ارتباطی بیسیم بههمراه دارند. این موارد کنار هم به ۱۰ تا ۱۰۰ میلیوات برق مصرفی نیاز دارند. بنابراین، دستگاههای انباشت انرژی نصبشده روی حشرات، برای افزایش دامنهی فعالیت و عملکرد رباتهای زیستی بسیار مهم هستند.
او همچنین اشاره کرد که دانشمندان دیگر، انواع دیگری از رباتهای زیستی از رباتهای شبپره تا سوسکهای سایبورگ را هم پیشنهاد کردهاند. بااینحال، وی معتقد است که بیشتر این حشرات سایبورگ فاقد وسایل ذخیره یا انباشت انرژی روی بدن خود هستند؛ زیرا فضای اشغالی و بار وزنی دستگاه انرژی، بهطور قابل توجهی تحرک آنها را مختل میکند. با در نظر گرفتن این ملاحظات میتوان گفت که افزودن یک دستگاه جمعآوری انرژی مناسب (سلول خورشیدی) برای شارژ مجدد واحد کنترل الکترونیکی روی حشره سایبورگ، یکی از دستاوردهای اصلی تحقیقات این تیم تحقیق بوده است.
سایبورگ ها درمقابل ربات های نرم
ممکن است استفاده از رباتهای نرم بهجای حشرات سایبورگ برای مأموریتهای جستجو و نجات، کاربردیتر و آسانتر به نظر برسد. رباتهای نرم هرگز مانند سوسکهای سایبورگ مأموریت را رها نمیکنند. بهعلاوه، میتوان آنها را بهشکل سریعتر و کارآمدتری ساخت. شاید این پرسش پیش آید که در این صورت چرا به حشرات سایبورگ نیاز داریم؟ پاسخ را باید در کلیدواژههای انرژی و هزینه جستجو کنیم. تنها چیزی که برای تبدیل سوسک به سایبورگ نیاز داریم، یک مدار مینیاتوری، یک منبع انرژی، تعدادی سیم و یک واحد کنترل و یک کولهپشتی پلیمری است. این در حالی است که ربات نرم کاملاً از صفر ساخته میشود.
اگرچه ممکن است اتصال سیمها به پاهای سوسک زمانبر به نظر برسد؛ اما زمان لازم برای ساخت یک ربات نرم بیشتر است. علاوه بر این، چنین رباتهایی در مقایسه با همتایان حشرهای خود، نیاز به انرژی بیشتری دارند. ما حرکت حشرات را با استفاده از صدور سیگنالهای الکتریکی به اعصاب حسی کنترل میکنیم. فوکودا توضیح داد:
این رویکرد نیاز به مصرف انرژی تقریباً ۱۰۰ میکرووات دارد که این مقدار، بسیار کمتر از مصرف برق مورد نیاز محرکهای متحرک برای رباتهای کوچک (معمولاً ۱۰۰ میکرووات یا بزرگتر) است.
سوسک سایبورگ جدا از داشتن قابلیتهای یک ربات، با استفاده از ورودیهای دریافتی از حواس طبیعی خود میتواند به خوبی در محیط حرکت کند و این مسئلهای است که یک ربات نرم هرگز نمیتواند به این شکل از پس آن برآید. محققان بر مبنای همین موضوع استدلال میکنند که حشرات سایبورگ در مقایسه با هر فناوری دیگری کمک بهتری در طول مأموریت های جستجو و نجات ارائه خواهند داد. فوکودا و تیمش اکنون در حال برنامهریزی برای ساختن نسخههای سایبورگ از انواع دیگر حشرات هستند؛ از جمله سایبورگهای مبتنی بر حشراتی که توانایی پرواز دارند.
باید منتظر کارهای این تیم و سایر تیمهای پژوهشی در گوشهوکنار دنیا بمانیم تا ببینیم مسیر پیشرفت سایبوگهای مبتنی بر حشرات در سالهای آینده به چه شکلی پیش خواهد رفت. شرح این کار تحقیقی و جزئیات آن در Flexible Electronics منتشر شده و ازطریق این لینک دردسترس است.
